Research
Waabi is pioneering the future of Physical AI.












We built our own road.
Our revolutionary Physical AI Platform enables—for the first time ever—true scale, generalizing to different form factors, geographies, and environments. This breakthrough is powered by the same AI model acting as a shared brain for both autonomous trucks and robotaxis.

We deliver a product that's faster, safer, more scalable, and efficient—unlocking the true potential of autonomous transportation.
Safe
The combination of advanced AI and neural simulation sets a new standard for the entire industry.
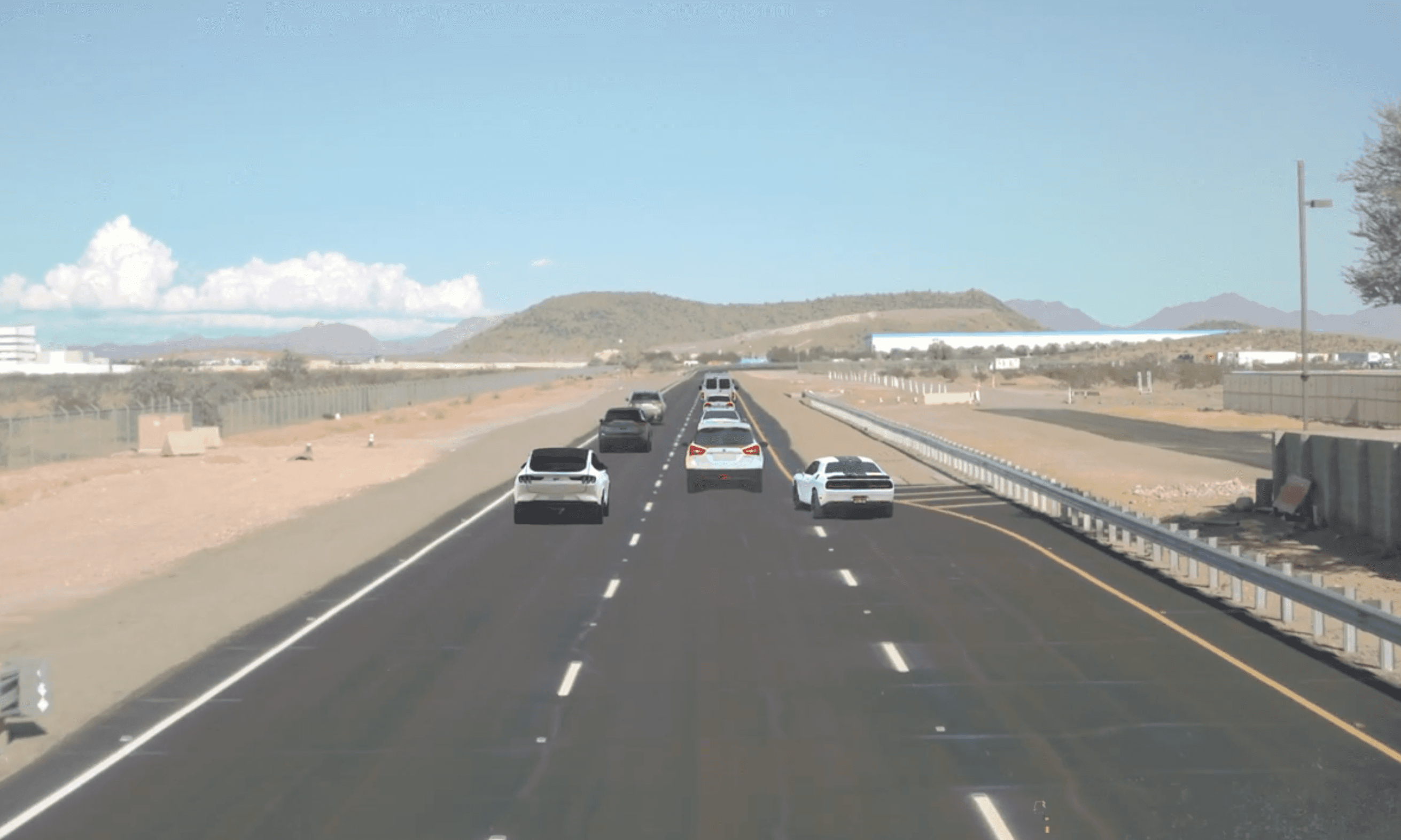
A single, verifiable end-to-end AI model capable of reasoning serves as a shared brain powering multiple verticals.
Our highway and surface street capabilities enable an unprecedented Direct to Customer trucking model and seamless entry into the robotaxi market.



Partnerships like the one between Volvo Autonomous Solutions and Waabi play an important role not only in advancing autonomous technology, but also in building the broader ecosystem required to support commercial deployment.
Explore technology deep dives, behind-the-scenes perspectives, and the ideas shaping the future of autonomy.