
April 30, 2024
Waabi Opens Purpose-Built AV Trucking Terminal in Lancaster, TX, Supercharging On-Road Operations
This terminal will serve as Waabi’s Texas home base, enabling continued commercial expansion in the…

March 18, 2024
Waabi to Bring the First Generative AI-Powered Trucking Solution, Built on NVIDIA DRIVE Thor, to Market
Waabi will integrate next-generation autonomous vehicle processor to deliver safe and reliable autonomous trucking at…
March 15, 2024
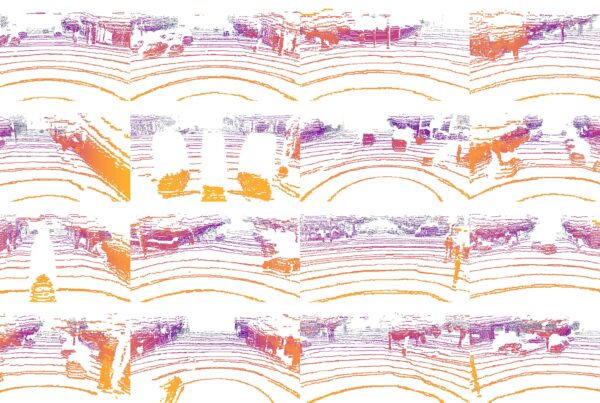
Introducing Copilot4D: A Foundation Model for Self-Driving
We live in a dynamic 3D world that evolves over time, and as we interact…
March 15, 2024
Copilot4D: Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion
Lunjun Zhang, Yuwen Xiong, Ze Yang, Sergio Casas, Rui Hu, Raquel Urtasun
November 23, 2023
Neural Lighting Simulation for Urban Scenes
Ava Pun* †, Gary Sun* †, Jingkang Wang*, Yun Chen, Ze Yang, Sivabalan Manivasagam, Wei-Chiu…

November 2, 2023
Join us at CoRL 2023
The Waabi team is looking forward to participating in the 2023 Conference on Robot Learning…
October 31, 2023
Towards Scalable Coverage-Based Testing of Autonomous Vehicles
James Tu, Simon Suo, Chris Zhang, Kelvin Wong, Raquel Urtasun
